

(Об уровне А для медицинских работников, инженеров и математиков по Н.Бернштейну)

Н.А. Бернштейн (1896 - 1966)
Н.А. Бернштейн (1896 - 1966)
Введение
Знание фундаментальных законов функционирования самого нижнего звена сложной иерархической системы любой двигательной активности живого организма и, особенно, человека, важно для диагностики, терапии, а также для обоснованного проектирования протезов и интеллектуальных искусственных медицинских систем. Таким базовым звеном и является уровень построения движения А в концепции Н.А. Бернштейна об уровнях построения движений [1].
1.Эффекторные функции или действия (мышечные движения) - являются определяющими для получения живой системой полезного результата [2 и 3]. Они определяют возможность и эффективность достижения цели всей целостной системы [4].
2.Сенсорные или рецепторные функции - выполняет важную обслуживающую для эффекторных систем функцию сигнализации и коррекции (координации).
3.Центральные перерабатывающие функции - выполняют для сенсорных систем обслуживающие функции, а такжефункции целеполагания [5].
4.Все движения или действия, совершаемые эффекторными системами, имеют многоуровневую организацию или структуру. Каждый новый в эволюции, выше лежащий уровень построения движения, имеет новое движение или новый класс движений. N уровням соответствует N списков или классов движений.
5.Эффекторная или двигательная система состоит, в общем случае, из двух частей:
- скелета, пассивной части,
-мышц или двигателей, активной части.
6.Степень свободы - направление подвижности, мера разнообразия направлений и форм подвижности. Это независимая координата. Число степеней свободы - это число независимых координат.
7.Переход от одной степени свободы к двум и более означает возникновение необходимости выбора. Биосистема всегда имеет возможность сама обосновать свой выбор.
8.В многостепенной эффекторной системе происходит суммирование во времени погрешностей и ошибок.
9. При построении движения учитываются реактивные силы инерции, трения, деформации.
10.Учитывая п.п. 8 и 9, протекание движения (траекторию) невозможно заранее предусмотреть и заранее запрограммировать, как в отношении точности, так и в отношении управляемости, т. е. послушности командам управления по ходу движения. Это важнейшая особенность биоуправления.
11.Задача координации и управления движением - это превращение движущегося органа - многозвенного манипулятора в управляемую систему, т. е. закрепление, преодоление, исключение избыточных степеней свободы. Для достижения этой цели имеется два средства:
-двигатели - связи,
-динамические силы, внутренние и внешние.
12.Между командой Е из центра, величиной управляющего импульса на двигатель, усилием Р, развиваемым мышцей, и результирующим движением delta l нет простой и однозначной связи или зависимости. Здесь имеется принципиальная неопределенность (рис. 1).
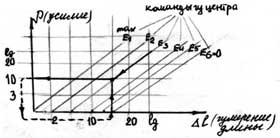
Рис.1.
Усилие, развиваемое двигателем или мышцей, зависит от текущей длины и изменения длины, от позы организма, от скорости движения, состава, деформации, реактивных сил. Величину команды из центра Е нельзя заранее рассчитать и предсказать однозначно, т. к. имеет место еще и кольцевая зависимость (обратная связь) между эффекторной и сенсорной системами (рис.2). Неоднозначность и кольцевая зависимость – более трудная задача для системы управления, чем простое исключение избыточных степеней свободы в многозвенной кинематической системе.
13.Центральная система решает задачу выбора команды Е из семейства возможных (рис.1). Решение вопроса о неоднозначности Е лежит в использовании следующих сенсорных сигналов:
- о позе кинематической цепи,
- о величине угловых скоростей в сочленениях,
- о величине длины мышцы в данный момент,
- о величине напряжения (давления, статического усилия) каждой из влияющих на
движение мышц.
Сенсорные сигналы – это непрерывно текущий поток информации от рецепторов к центру, а от него – к эффекторам.
14.«Принцип сенсорной коррекции» [1]. Он ведет систему, определяет характер движения, его целеустремленность за счет постоянной коррекции эффекторных команд информацией от сенсорных систем.
15.Сенсорным системам, помимо коррекционной роли, принадлежит главная роль в:
- инициации движения,
- задании установок, задания порогов и параметров регулирования,
- запуске самого движения.
16.Протекание процесса управления движением в виде взаимодействия эффекторных (моторных) и сенсорных процессов, в виде «рефлекторного кольца» (рис. 2) (а не цепи «сенсорное воздействие – рефлекторный эффекторный ответ»). Это фундаментальная форма протекания любого двигательного акта. Это координация вида эффекторной команды Е.

Рис.2
17.Для достижения управляемости кинематической системой необходимо найти
равнодействующую следующих сил:
- активной – мышечного усилия Р,
- внешней Fвн,
- реактивной Fр.
18.Все вышесказанное можно выразит в форме известного дифференциального уравнения Н.А.Бернштейна [6],уравнения движения одного кинематического звена в поле тяготения под действием одной мышцы:
Jd2α/dt = F[ E(t, αdαdt) αdα/dt] + mG(α(1),
где J – момент инерции звена,
F – момент, усилие, мера напряжения мышцы,
E – команда из центра,
m – масса,
G(α) - момент силы тяжести,
α – угол сочленения.
Из уравнения (1) следуют следующие выводы:
- взаимодействие центра и периферии носит циклической, кольцевой характер,
- имеется несколько циклов (рис. 3), контуров связи, внутренние и внешние через фото- и тактильные рецепторы, а также, через другие типы сенсорных систем,
- однозначной связи между командой из центра и траекторией движения нет,
- произвольное, целенаправленное движение возможно только лишь при условии тончайшего, непрерывного, не запрограммированного заранее, согласования, коррегирования центральных команд с явлениями, происходящими на периферии.
19.Необходимость постоянного учета вариабельности, лабильности [8 и 9] и нестабильности параметров управляемой системы: переменная масса груза, меняющаяся эффективность двигателя и др., еще более усложняют задачу управления движением из центра.
20.Каждому уровню движения соответствуют свои сенсорные поля или системы, определенные виды рецепторов. Каждой двигательной задаче, в зависимости от ее содержания, смысловой структуры, соответствует тот или иной уровень построения движения и, соответственно, тот или иной, наиболее ему адекватный, сенсорный синтез, по качеству и составу образующих его сенсорных сигналов с тех или иных рецепторов. Каждой двигательной задаче соответствует свойведущий уровень построения движения или управления.
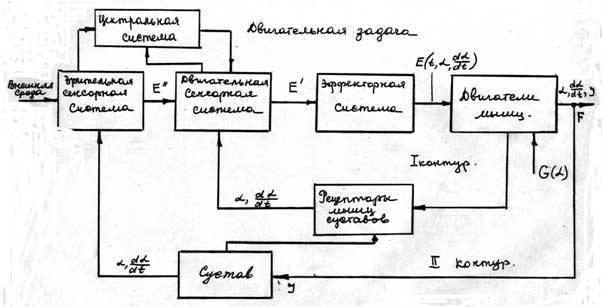
Рис.3. Двухконтурная регуляция движения
21.В нервной системе человека и позвоночных различают пять основных уровней построения движений:
- Уровень А – кинетических регуляций.
- Уровень В – синергий, штампов.
- Уровень С – пространственного поля.
- С1 – слежения по ходу движения.
- С2 – целевой.
4. Уровень Д– действий.
5. Уровень (группа уровней) Е – символических координаций.
- Е1, Е2, Е3, …
22. Все уровни построения движения можно охарактеризовать рядом общих показателей:
- локализация в мозге (рис. 4) и субстрат (аппаратура и ее размещение в
технической системе).
- ведущие сенсорные сигналы,
- характеристика специфических свойств движения,
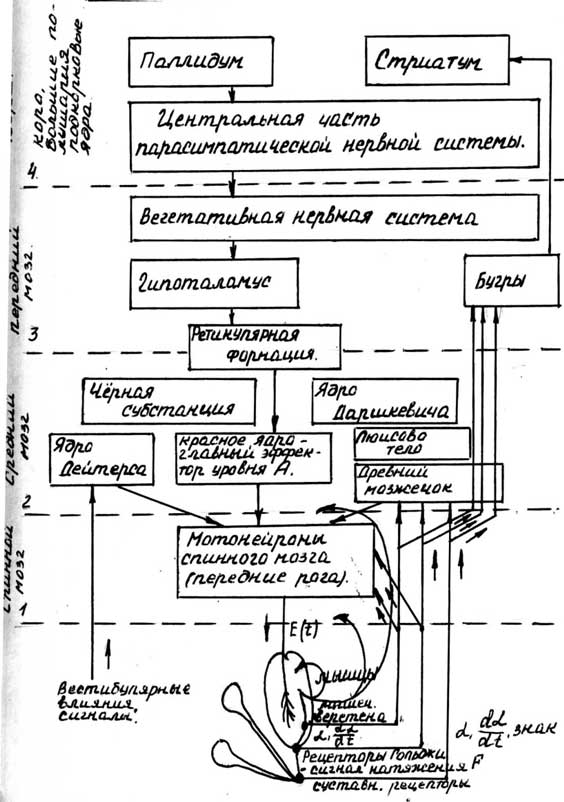
Рис.4.
- самостоятельные движения (внутренняя активность), управляемые данным уровнем,
- фоновая роль уровня в двигательных актах вышележащих уровней в многоуровневой системе.
- дисфункция, проявление нарушений, отказы работы уровня.
Ниже следует подробный анализ уровней построения движения.
1. УРОВЕНЬ А.
1.1. «Аппаратура» и ее расположение в системе управления уровня А. Субстрат и его локализация показаны на рис. 4.
1.2. Ведущая сенсорная информация уровня А:
- информация об уровне метаболизма, обменного процесса и о функциональном состоянии мышц, нервов, нейронов, рецепторов, т. е. о величине коэффициентов, значении параметров в дифференциальных уравнениях контуров регулирования,
- информация с датчиков величины мышечного напряжения (с рецепторов Гольджи), о направлении развиваемого усилия, величины усилия, положения вектора гравитационного поля (с отолитов),
- проприоцепторика тропизмов, длина мышцы (с веретен, суставных рецепторов),
- информация о глубинном осязании, давлении на опору (с датчиков Паччини, рецепторов Мейснера, Краузе).
На данном уровне построения движения свой (на каждом уровне свой) прием, состав и способ осуществления сенсорной коррекции.
Элементарная кольцевая связь типа «активность мышцы, т. е. ее метаболизм, - длина мышцы» - это внутреннее кольцо регуляции.
Следующий иерархический уровень регуляции (кольцо) внутри уровня А – это «мышечное веретено, рецепторы Гольджи – мотонейроны передних рогов спинного мозга», и т.д. по иерархии.
1.3. Характеристики и свойства движений уровня А.
1.3.1. Самая древняя двигательная система – это гладкая мускулатура без костно – суставного аппарата, управляемая вегетативной нервной системой (медуза).
1.3.2. Движения данного уровня являются палео кинетическими (древними, связанными со структурой мозга - паллидум), плавными, тоническими по своей природе, играют позную, статокинетическую, формоприспособительную роль. На этом уровне не решаются двигательные задачи, связанные с точными координатами тела и, тем более, с координатами внешними.
В мягких органах (кишечник, желудок, матка) уровень А выполняет самостоятельную двигательную функцию, такую, например, как проталкивание пищи, перемешивание пищи, выталкивание плода и др.
При наличии костно – суставного аппарата, уровень А выполняет вспомогательную, фоновую роль, роль тонического приспосабливания быстрого фазного силового движения к внешним условиям и состоянию внутренней среды. Он играет роль тонкой регуляции силы, величины и скорости, формы быстрых движений (движений балерины), осуществляет позные рефлексы (статические реакции позы и равновесия).
1.3.3. Уровень А осуществляет смещение семейства кривых «удлинение - сила» (рис. 1).
Это аналоговый – градуальный процесс смещения порогов, коэффициентов усиления и постоянных времени звеньев регулятора. Направление и величина сдвигов определяется либо верхним, вышележащим командным уровнем управления, если он есть, либо обменными процессами метаболизма на данном уровне, если он единственный (медуза). То есть, решается двигательная задача сохранения структуры субстрата, обеспечения надежности функционирования и выживания.
При наличии уровней В, С, Д, Е, при управляемости сверху, уровень А регулирует их, обеспечивая гибкость и настраиваемость движения на этих уровнях.
1.3.4. На уровне А осуществляется активный тонический процесс удлинения мышцы при реципрокном сокращении ее антагониста, т. е., не просто ее выключение из работы, а управляемое торможением расслабление. Это связано с подпороговым, до срабатывания фазных мотонейронов, сдвигами тонуса напряжения мышцы. Это центральная преднастройка для тонических мышц быстрых фазных мышечных движений, которые осуществляются дискретным принципом, путем включения разного целого числа мышечных волокон, и не поддается аналоговому регулированию. Здесь налицо взаимодействуют два аппарата: дискретный, грубый, сильный быстрый (баллистический), неуправляемый по ходу движения, и аналоговый, мягкий, плавный, чуткий, тонкий.
1.3.5. Уровень А устанавливает предварительно константы и параметры, по которым будет протекать фазный дискретный процесс. Он осуществляет перестройку параметров звеньев регулятора по ходу движения.
1.3.6. Перестройка параметров и констант звеньев регулятора осуществляется еще путем постепенного вовлечения мышечных волокон и двигательных единиц, последовательного и параллельного распределения команд по группам двигателей в одной мышце и по антагонистическим парам мышц. Происходит перестройка вязкости, упругости и тянущего усилия одной мышцы.
Реципрокная (антагонистическая, синергетическая, парная) иннервация и координация командных сигналов по парам мышц – антагонистов (сгибателей - разгибателей) является основой всякого движения костно – суставного аппарата. Имеет место активное удлинение антагониста при развитии напряжения внешней силой тянущей мышцы при ее сокращении.
1.3.7. Построить сложное движение высшего уровня из совокупности, суммы простых движений нижних уровней нельзя. В синтезе движения высшего уровня осуществляется разгрузка ведущего уровня движения по сенсорной информации. Ведущий уровень распространяет свой регулирующий контроль на нижележащие, фоновые в данном сверху движении уровни. Нижние уровни, работая на движение вышележащего уровня, теряют свою индивидуальность.
1.4. Самостоятельные движения, управляемые уровнем А.
1.4.1. Уровень А – это абсолютный монополист по тонусу во всей центральной нервной системе (ЦНС). Он осуществляет ряд специальных рефлексов:
- реципрокное активное удлинение антагонистов (реципрокное торможение). Об это выше было сказано;
- центральное регулирование постоянных времени, скоростных процессов возбудимости функциональных единиц «мотонейрон – двигательная единица» или группа двигательных единиц – клеток, управляемых одним мотонейроном; синхронизация работы групп мышц, волокон и нейронов, изохронизм в системе. Осуществление переходов «изохронизм - герерохронизм». Они осуществляются, в основном, путем регуляции порогов срабатывания мотонейронов, т. е. регулированием задержек выдачи импульсных сигналов на мышцы. При этом дозируется поток импульсов команд на мотонейроны мышц – антагонистов, регулируется их переключение по каналам «сгибание - разгибание». Этот тип регуляции служит целям реципрокной координации;
- тонические рефлексы из системы Красного ядра, т. е. «мышечный тонус». Он реализуется в основном у беспозвоночных животных гуморальным химических сдвигом, смещением характеристик семейства «усилие - удлинение» (рис. 1). И его деформацию за счет изменения механических характеристик мышцы (механических параметров двигателя). У позвоночных, что имеет прямое отношение к управлению манипулятором, за счет синтеза медиаторов электротонического быстродействующего смещения порогов возбудимости, постоянных времени и коэффициентов усиления звеньев регуляторов и параметров механических звеньев, т. е. превращение режима работы дискретных звеньев в аналоговые. Перевод работы фазных мышц в режим гладких мышц.
Виды тонусов мышцы и ткани:
- эластичный тонус коркового происхождения,
- вязкий тонус уровня регуляции среднего мозга, его экстрапирамидной системы,
Они проявляются при шейно – туловищных стато – кинетических рефлексах («тетанический тонус»).
Тонус мышцы. – это фактическое состояние вязкости и упругости мышечной ткани, и все виды гибкого, пластического регулирования чувствительности к импульсным, рывковым движениям.
Тонус – это меняющееся состояние нервно – мышечной предподготовленности периферийного аппарата к избирательному приему команды и ее реализации. Напряжение мышцы определяется уравнением с двумя неизвестными:
- функциональным состоянием мышцы, механической мерой чувствительности к импульсным командам, градуальностью, аналоговой характеристикой;
- наличной длиной мышцы и скоростью ее изменения.
Вторая переменная, т. е. текущие значения α(t),dα/dt(t) не подвластны ЦНС, и через проприорецепторные каналы сигнализируется в ЦНС. Задача ЦНС – подставить в уравнение значение первой переменной. Найти такую форму мышечного воздействия, чтобы полезным результатом решения уравнения было бы значение величины мышечного усилия, как раз требуемого по условиям движения, т. е. в соответствии с двигательной задачей. Налицо здесь алгоритм и его внутреннее содержание акцептора действия будущего результата работы функциональной системы П.К.Анохина [5]. Аппарат предвосхищения или упреждения (планирования, предсказания) будущего результата, работающего целиком на использовании содержимого памяти, накопленного прошлого прижизненного или генетического опыта. Это и есть то, что делает уровень А. Он дозирует дискретные кванты через:
- управляемую амплитуду импульсов, создавая и регулируя аналоговую подкладку или составляющую;
- изменение процента, доли работающих двигательных единиц и числа мышечных волокон или сократительных клеток в двигательной единице за счет герерохронизма или периодического на малый интервал времени выключения (включения) отдельных каналов в пучке. Порождает пачки импульсов управления;
- регуляцию механических характеристик двигателей – мышц, их вязкости и упругости.
1.5. Фоновая роль уровня А.
Принятие и удержание позы. Возникновение режима «тремор покоя» - это генерация чисто синусоидальных колебаний нервно-мышечного звена около уровня равновесия в регуляторе. Это основной фон любого движения организма. Фон гибкого реактивного перестраиваемого тонуса всего мышечного массива тела. Фон регулирования фазных движений. Взаимодействие уровней построения движения осуществляется по «принципу пластичности».
1.6. Дисфункции и синдромы уровня А.
- Разрушения на уровне А, вызванные дистонией, т.е. виды тони b: гипертония и гипотония. Утрата управления уровнем Асверху вызывает синдром Паркинсона в виде тремора, регидность при исчезновении сверху контроля за тонусом.
- Треморы:
а) «Тремор покоя» - это гиперфункция или усиление функции эффектора на частоте 8 – 10 герц. Он исчезает во сне и с началом активной двигательной деятельности. Возникает при утомлении, парабиозе при длительном протекании однообразного движения.
б) «Интенционный тремор» - это гипофункция, ослабление сверху влияния Красного ядра. В покое отсутствует. Возникает при сознательном намерении или начале действия. Проявляется как неправильное, суетливое колебательное подергивание или движение. Чем большее усилие, направленное на его подавление, тем сильнее тремор проявляется. При этом выпадает функция реципрокная координация и торможение антагониста. Эффекторная команда «затекает» в мышцу - антагонист. Происходит борьба противоречивых команд на мотонейронах и мышц – антагонистов за направление и скорость движения. При этом нет правильной дозировки усилий.
1.7. Уровень А – это уровень моторики туловища тела и его сегментов.
ЛИТЕРАТУРА
- Бернштейн Н.А. Физиология движений и активность. М. Наука. 1990.
- Бернштейн Н.А. О построении движений. М. Медицина. 1947.
- Бернштейн Н.А. Проблема взаимоотношений локализации и координации//Архив биологических наук. № 1. 1935.
- Анохин П.К. Проблема центра и периферии в современной физиологии нервной деятельности.//Сб. Проблема центра и периферии в нервной деятельности. Горький. 1935.
- Анохин П.К. Теория функциональной системы. //ж.-л Успехи физиологических наук. Том. 1. № 1. 1970.
- Бассин Ф.В. О подлинном значении нейрофизиологических концепций Н.А. Бернштейна //ж.-л Вопросы философии. № 11. 1967.
- Цыганков В.Д. Некоторые замечания к общей теории мозга. //Сб. Принципы системной организации функций. М. Наука. 1973.
- Цыганков В.Д. Нейрокомпьютер и его применение. М. Сол Ситем. 1993.
- Цыганков В.Д. Нейрокомпьютер и мозг. М. СИНТЕГ. 2001.
- Цыганков В.Д. Нейробионика нейрокомпьютера. М. Юго-Восток-Сервис. 2009.

